 0913376786
0913376786  vietnam.highway@dailo.vn
vietnam.highway@dailo.vn 
A. Khái niệm giám sát đa điểm MLAT.
Dịch vụ giám sát trong ngành hàng không có vai trò phục vụ công tác quản lý không lưu (ATM), đưa ra cảnh báo thời tiết, phát hiện chướng ngại vật địa hình, và hỗ trợ tìm kiếm cứu nạn. Thiết bị giám sát phục vụ ATM hiện nay gồm có Radar, ADS, MLAT, CDPLC, và thoại VHF. Dựa trên các kỹ thuật định vị khác nhau, công nghệ giám sát được phân làm hai loại là giám sát độc lập và giám sát hợp tác. Giám sát độc lập là công nghệ giám sát mà hệ thống tự phát hiện được vị trí mục tiêu mà không cần tín hiệu phát đi từ mục tiêu. Ngược lại, với công nghệ giám sát hợp tác, hệ thống cần sử dụng tín hiệu phát đi từ mục tiêu để định vị mục tiêu. MLAT thuộc công nghệ giám sát hợp tác. Công nghệ MLAT có một ưu điểm hơn so với các công nghệ giám sát hợp tác khác, đó là có khả năng lợi dụng luôn được tín hiệu tàu bay phát đi trong quá trình trao đổi liên lạc với những hệ thống giám sát khác. Nhờ đó, hệ thống MLAT khi triển khai mới dễ dàng tương thích được với cơ sở hạ tầng giám sát cũ, giao tiếp được với các trang thiết bị sẵn của tàu bay như bộ phát đáp mode A/C, mode S, thiết bị phát tự động ADS-B, mà không yêu cầu các tàu bay phải trang bị thêm thiết bị chuyên biệt.
Hệ thống MLAT có thể làm việc ở chế độ thụ động hoặc tích cực. Khi làm việc ở chế độ thụ động, nó chỉ thu và xử lý tín hiệu từ tàu bay gửi đến. Khi làm việc ở chế độ tích cực, nó phát tín hiệu hỏi giống SSR để kích tín hiệu phát đi từ tàu bay. Một hệ thống MLAT thụ động chỉ cần các trạm thu mặt đất trong khi một hệ thống MLAT tích cực phải bao gồm thêm cả trạm phát hỏi. Hệ thống MLAT thụ động cần dựa nhờ vào các hệ thống radar xung quanh phát tín hiệu hỏi để kích tín hiệu trả lời từ mục tiêu. Khi hệ thống MLAT có khả năng xử lý tín hiệu ADS-B, trạm phát hỏi sẽ không cần dùng đến bởi tàu bay phát quảng bá tín hiệu ADS-B một cách định kỳ. Hệ thống MLAT tích cực có khả năng đứng độc lập với các hệ thống giám sát khác.
B. Kỹ thuật định vị MLAT.
MLAT định vị tàu bay bằng kỹ thuật TDOA (Time Difference of Arrival - sai khác thời gian đến trạm thu của cùng tín hiệu gửi đi từ tàu bay). Kỹ thuật này áp dụng lý thuyết tỉ lệ thuận giữa quãng đường và thời gian thông vận tốc truyền sóng 3.108m/s để tính vị trí mục tiêu dựa trên các sai khác thời gian thu tín hiệu giữa các trạm thu đối với cùng một tín hiệu được phát đi từ tàu bay. Trong không gian 3 chiều, vị trí mục tiêu được xác định là điểm giao cắt giữa các mặt hyperbol thiết lập bởi tập hợp các điểm có hằng số sai khác khoảng cách, tương đương với hằng số sai khác thời gian thu tín hiệu, giữa các cặp trạm thu. Trong không gian 2 chiều, vị trí mục tiêu là giao điểm các đường quỹ tích dưới dạng hyperbol của các điểm có hằng số sai khác khoảng cách, tương đương với hằng số sai khác thời gian thu tín hiệu, giữa các cặp trạm thu. Như vậy, MLAT cần tối thiểu bốn trạm thu để xác định vị trí mục tiêu trên không, và ba trạm thu để xác định vị trí mục tiêu mặt đất. Bên cạnh sai số đo đạc thời gian thu tín hiệu tại cách trạm, vị trí tương đối của mục tiêu tới các trạm thu và sắp xếp vị trí của các trạm thu là những nguyên nhân chính gây ảnh hưởng tới độ chính xác định vị mục tiêu.
Khi hệ thống MLAT sử dụng thông tin vị trí được mang trong tín hiệu thu từ mục tiêu, số lượng trạm thu cần thiết để định vị có thể giảm. Tuy nhiên độ chính xác định vị khi đó sẽ bị chi phối bởi nguồn dữ liệu ngoài hệ thống.
C. Ảnh hưởng của sắp xếp vị trí trạm thu tới độ chính xác định vị bằng công nghệ MLAT
Sắp xếp vị trí các trạm thu hệ thống là một trong những tác nhân chính ảnh hưởng tới độ chính xác định vị bằng MLAT. Sự phụ thuộc của sai số định vị theo bố trí hình học hệ thống được thể hiện bằng GDOP (Geometric dilution of precision - hệ số suy giảm độ chính xác theo bố trí hình học hệ thống). Hệ số GDOP được xem là độ khuếch đại của sai số đo, thể hiện mối liên kết giữa sai số tổng thể (σ_xyz) và sai số đo TDOA (σ_TDOA):
σ_xyz=GDOP σ_TDOA
GDOP thay đổi theo vị trí tương đối của mục tiêu so với các trạm thu. Vì thế, cho dù độ chính xác TDOA giống nhau, mục tiêu ở các vị trí khác nhau sẽ cho kết quả định vị có độ chính xác khác nhau. GDOP có giá trị lý tưởng là 1. GDOP càng lớn thì sai số cũng sẽ càng lớn.
Giá trị GDOP không chỉ phụ thuộc vào bố trí hình học hệ thống, mà còn liên quan tới số lượng các trạm thu. Nhìn chung, với cách bố trí hợp lý, số lượng trạm càng lớn thì giá trị GDOP càng nhỏ, độ chính xác sẽ càng được cải thiện.
D. Phần mềm hỗ trợ khảo sát thiết kế sắp đặt trạm MLAT cho khu vực sân bay.
D.I. Sự cần thiết của phần mềm.
Phần mềm được đưa ra nhằm giải quyết vấn đề xác định các vị trí đặt trạm thu đối với thiết kế hệ thống MLAT giám sát khu vực sân bay nhằm tạo được vùng phủ sóng đảm bảo chất lượng cho khu vực cần giám sát:
- Khó khăn bao quát được cả một khu vực rộng lớn của sân bay cần được phủ sóng.
- Khó khăn nhận biết ảnh hưởng của chướng ngại vật trên sân bay tới tầm phủ.
- Khó khăn thử nghiệm số lượng lớn các phương án sắp đặt vị trí của trạm trên hiện trường thực tế.
Nếu không có công cụ hỗ trợ, lượng công việc cần làm để tìm phương án cho vùng phủ sóng đảm bảo chất lượng sẽ lớn, khó có thể thực hiện.
Công cụ phần mềm là sản phẩm của nhiệm vụ KH&CN này cung cấp được môi trường thực nghiệm cùng với các tiện ích cho phép người dùng thiết lập được môi trường thực nghiệm phù hợp với môi trường thực tế cần khảo sát; hỗ trợ người dùng xây dựng các phương án thử nghiệm; khảo sát, tính toán, đánh giá chất lượng vùng phủ theo các phương án sắp đặt trạm, giúp người dùng quyết định lựa chọn phương án tối ưu.
D.II. Tính năng phần mềm
- Cung cấp môi trường thực nghiệm
Một môi trường thực nghiệm cho khu vực sân bay được đặc trưng bởi: Bản đồ sân bay, Bản đồ chướng ngại vật trên sân bay, Khu vực quan tâm, và Bộ tham số cấu hình.
Tính năng này cho phép người dùng tạo môi trường thực nghiệm và thiết lập cấu hình phù hợp với khu vực cần khảo sát.
- Thử nghiệm phương án
Phần mềm đưa ra phương tiện giúp người dùng tự đưa ra các cách sắp đặt trạm, hoặc nhập vào phương án sẵn có. Các phương án sắp đặt trạm cũng lưu xuất được ra file để sau này dùng lại, hoặc sử dụng cho các công việc khác liên quan.
- Khảo sát
Đây là tính năng chính của phần mềm. Tính năng này thực hiện phân tích, tính toán theo các phương án sắp đặt trạm để đưa ra các kết quả yêu cầu. Các chức năng khảo sát mà phần mềm hỗ trợ gồm có:
- Đánh giá chất lượng vùng phủ sóng: Vùng phủ được thể hiện là phạm vi khu vực giới hạn bởi ngưỡng tối đa giá trị GDOP. Từ phương án sắp xếp vị trí các trạm thu cùng với các giá trị yêu cầu được thiết lập cho GDOP, phần mềm thực hiện tính toán và đưa ra biểu đồ vùng phủ theo các mặt bằng độ cao cần giám sát. Đồng thời, trong phạm vi khu vực quan tâm được cấu hình, phần mềm tính toán và đưa ra biểu đồ thể hiện chất lượng vùng phủ. Chức năng này không chỉ giúp người dùng dễ dàng nhận diện được vùng phủ sóng tương ứng với mỗi phương án một cách trực quan, mà còn định lượng được chất lượng vùng phủ sóng cho khu vực quan tâm của phương án đó.
- Khảo sát ảnh hưởng của chướng ngại vật: Khi đánh giá chất lượng vùng phủ sóng, phần mềm xem xét cả ảnh hưởng của chướng ngại vật trên sân bay đến vùng phủ sóng. Ngoài ra, phần mềm còn cung cấp các tiện ích cho phép người dùng khảo sát được tầm nhìn thẳng giữa mục tiêu và các trạm thu MLAT như: tính toán bản đồ tầm nhìn thẳng của trạm thu; xác định các trạm trong tầm nhìn thẳng tới mục tiêu; nhận dạng chướng ngại vật tầm nhìn thẳng giữa trạm và mục tiêu. Tiện ích này giúp người dùng nhận diện được nguyên nhân khiến chất lượng vùng phủ tại khác khu vực bị suy giảm do chướng ngại vật, từ đó tìm ra phương án sắp đặt trạm một cách hợp lý.
- So sánh các phương án: đây là tiện ích được phần mềm cung cấp để hỗ trợ người dùng trong quyết định lựa chọn phương án sắp đặt trạm tối ưu. Với tiện ích này, người dùng thể hiện được đồng thời các biểu đồ chất lượng vùng phủ của nhiều phương án trên cùng một hệ trục tọa độ, nhận diện được tính ưu việt giữa các phương án một cách trực quan.
- Tiện ích đồ họa
Phần mềm cung cấp các công cụ tiện ích đồ họa để người dùng linh hoạt thực hiện khảo sát, lưu lại được các hình ảnh khảo sát; tùy chọn đối tượng hiển thị như bản đồ sân bay, bản đồ chướng ngại vật, khu vực quan tâm, vị trí mục tiêu, vị trí các trạm, vùng phủ được tính toán; lựa chọn chế độ hiển thị như phóng to, thu nhỏ, di chuyển tới khu vực cần xem…
D.III. Kết quả
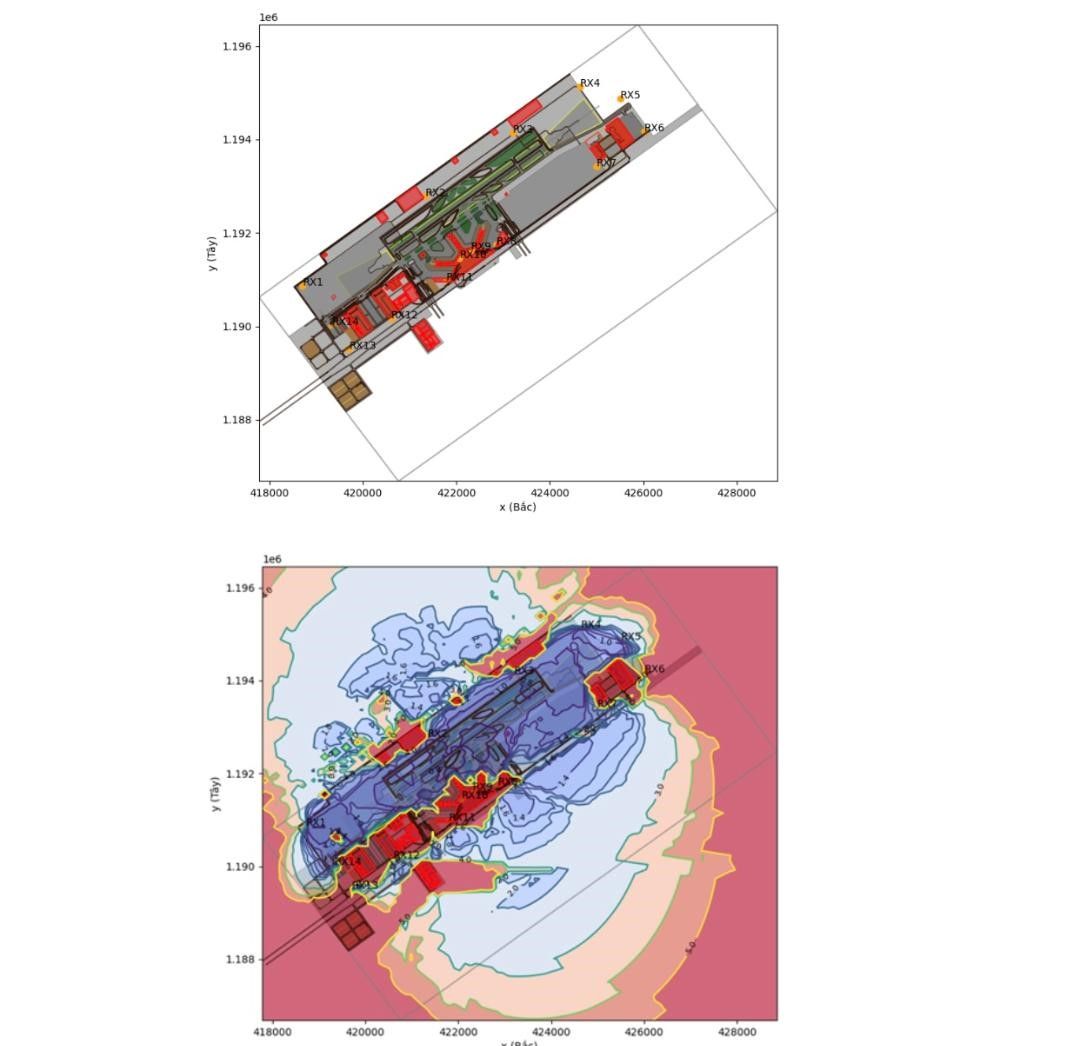
Phần mềm đã được thử nghiệm cho các khu vực sân bay Nội Bài, Phú Quốc, và dự án sân bay Long Thành. Các hình 1, 2, 3 là một số hình ảnh minh họa cho một số kết quả nhận được từ phần mềm khi tiến hành các thử nghiệm này.
.jpg) Sân bay Nội Bài
Sân bay Nội Bài
.jpg) Sân bay Phú Quốc
Sân bay Phú Quốc
.jpg) Dự án sân bay Long Thành
Dự án sân bay Long Thành
Với các tính năng và tiện ích mà công cụ phần mềm mang lại, sản phẩm nghiên cứu khoa học này giúp công việc thử nghiệm các phương án sắp đặt vị trí trạm MLAT cho khu vực sân bay được dễ dàng. Việc ứng dụng phần mềm sẽ giải quyết được các vấn đề mà các khảo sát thực tế không, hoặc khó thực hiện được, ví dụ như số lượng phép thử bị hạn chế. Công cụ phần mềm này cho phép người dùng thực hiện được nhiều phép thử với đa dạng cách sắp đặt trạm, nhận được kết quả khảo sát một cách nhanh chóng, tích kiệm được nhiều công sức, chi phí, và thời gian. Sản phẩm nghiên cứu khoa học này có đầy đủ giá trị cả về khoa học cũng như lợi ích kinh tế.
Nhóm nghiên cứu hi vọng sản phẩm của nhiệm vụ sẽ thực sự hữu dụng cho công việc thiết kế đối với các dự án MLAT của Tổng công ty, góp phần mang lại hiệu quả tốt nhất các hệ thống MLAT sau khi hoàn thành, đảm bảo chất lượng phủ sóng đáp ứng yêu cầu cho khu vực sân bay cần được giám sát.